运动控制系统设计,原理、挑战与解决方案
时间:2024-10-05 来源:网络 人气:
运动控制系统设计:原理、挑战与解决方案
随着工业自动化和智能制造的快速发展,运动控制系统在各个领域中的应用日益广泛。本文将探讨运动控制系统的设计原理、面临的挑战以及相应的解决方案。
一、运动控制系统的基本原理
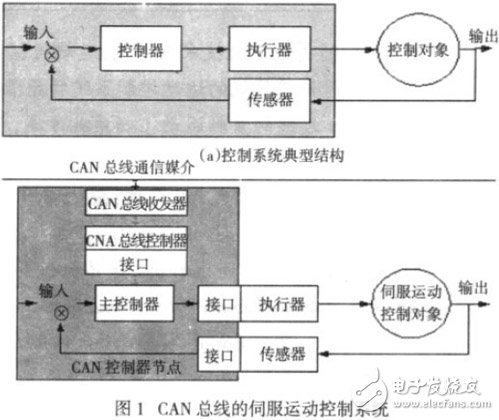
运动控制系统主要由控制器、执行器和反馈装置组成。控制器根据预设的目标和反馈信息,对执行器进行控制,使执行器按照预定轨迹或速度运动。
1. 控制器:负责接收反馈信息,根据预设目标进行计算,输出控制信号。
2. 执行器:根据控制信号进行运动,如电机、液压缸等。
3. 反馈装置:实时监测执行器的运动状态,将信息反馈给控制器。
二、运动控制系统设计面临的挑战

1. 精确性要求高:运动控制系统需要满足高精度、高速度、高稳定性等要求。
2. 系统复杂性:随着控制对象和功能的增加,系统复杂性不断提高。
3. 实时性要求:运动控制系统需要实时响应,以满足实时控制需求。
4. 系统可靠性:控制系统需要具备较高的可靠性,以保证长期稳定运行。
三、运动控制系统设计解决方案
1. 采用先进的控制算法:如PID控制、模糊控制、自适应控制等,以提高控制精度和稳定性。
2. 优化硬件设计:选用高性能的执行器和传感器,降低系统误差。
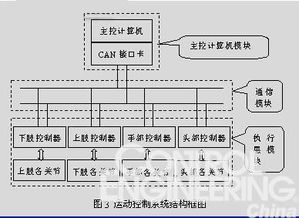
3. 采用模块化设计:将系统划分为多个模块,提高系统可扩展性和可维护性。
4. 实时性优化:采用多线程、中断等技术,提高系统实时性。
5. 系统集成与优化:采用先进的集成技术,降低系统复杂度,提高系统性能。
四、运动控制系统设计实例

以一个典型的机器人运动控制系统为例,介绍其设计过程。
1. 需求分析:根据机器人应用场景,确定运动控制系统的性能指标,如速度、精度、稳定性等。
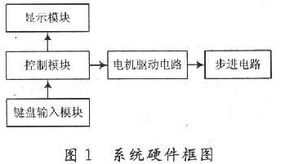
2. 硬件选型:根据性能指标,选择合适的执行器、传感器和控制器。
3. 控制算法设计:根据执行器和传感器的特性,设计合适的控制算法。
4. 系统集成与调试:将硬件和软件集成,进行系统调试,确保系统性能满足要求。
运动控制系统设计是一个复杂的过程,需要综合考虑精度、实时性、可靠性等因素。通过采用先进的控制算法、优化硬件设计、模块化设计等方法,可以有效提高运动控制系统的性能。随着技术的不断发展,运动控制系统将在更多领域发挥重要作用。
相关推荐


教程资讯
教程资讯排行
- 1 能够结交日本人的软件,盘点热门软件助你跨越国界交流
- 2 psp系统升级620,PSP系统升级至6.20官方系统的详细教程
- 3 显卡驱动无法找到兼容的图形硬件,显卡驱动安装时出现“此图形驱动程序无法找到兼容的图形硬件”怎么办?
- 4 能玩gta5的云游戏平台,畅享游戏新体验
- 5 安卓换苹果系统游戏,轻松迁移账号攻略
- 6 oppo刷原生安卓系统,解锁、备份与操作步骤详解
- 7 读书郎平板系统升级,读书郎平板电脑系统升级指南
- 8 海康威视c2c设备不在线,海康威视C2C设备不在线的常见原因及解决方法
- 9 ipad软件老是闪退?,iPad软件老是闪退?原因及解决方法全解析
- 10 国外收音机软件 app,国外收音机软件APP推荐