
fanuc系统宏变量,FANUC系统宏变量的概述与使用
时间:2024-10-15 来源:网络 人气:
FANUC系统宏变量的概述与使用

FANUC系统宏变量是数控机床编程中非常重要的一部分,它允许用户在程序中定义和使用变量,从而提高编程效率和程序的可读性。本文将详细介绍FANUC系统宏变量的概念、类型、使用方法以及注意事项。
一、FANUC系统宏变量的概念

FANUC系统宏变量是指在FANUC数控系统中,用户可以自定义的变量。这些变量可以存储数值、字符串等信息,并在程序中通过特定的指令进行读写操作。宏变量在编程中具有很高的灵活性,可以用于实现各种复杂的控制功能。
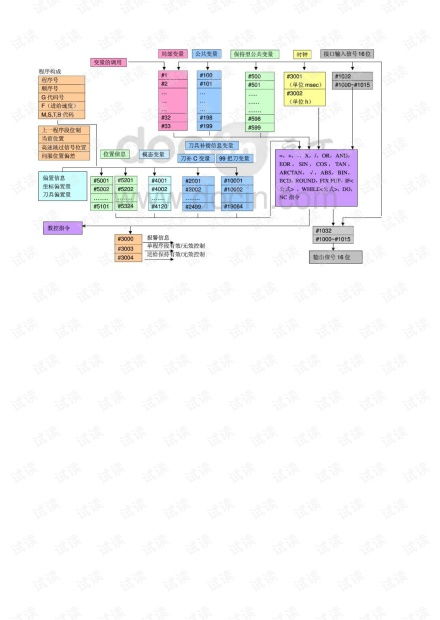
二、FANUC系统宏变量的类型

FANUC系统宏变量主要分为以下几种类型:
局部变量:局部变量仅在当前程序中有效,当程序执行完毕后,局部变量将自动释放。
公共变量:公共变量可以在多个程序中共享,当程序执行完毕后,公共变量仍然保留。
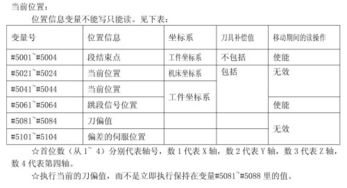
系统变量:系统变量是FANUC数控系统内部定义的变量,用于存储系统状态、参数等信息。
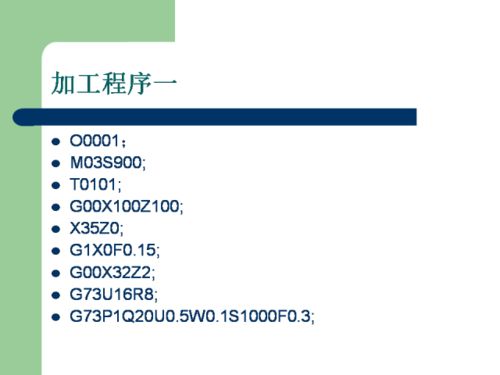
三、FANUC系统宏变量的使用方法
1. 定义宏变量
在FANUC系统中,用户可以通过以下方式定义宏变量:
使用宏变量定义指令:例如,使用`1000=10`定义一个名为`1000`的局部变量,并将其值设置为10。

使用`SET`指令:例如,使用`SET 1000, 10`定义一个名为`1000`的局部变量,并将其值设置为10。

2. 读写宏变量
在FANUC系统中,用户可以通过以下方式读写宏变量:
使用赋值指令:例如,使用`1000 = 1001`将`1001`的值赋给`1000`。
使用读取指令:例如,使用`1000`读取`1000`变量的值。
四、FANUC系统宏变量的注意事项
1. 避免使用相同的变量名
在定义宏变量时,应避免使用相同的变量名,以免造成混淆或错误。
2. 注意宏变量的作用域
局部变量仅在当前程序中有效,而公共变量可以在多个程序中共享。在使用宏变量时,应注意变量的作用域,避免出现错误。
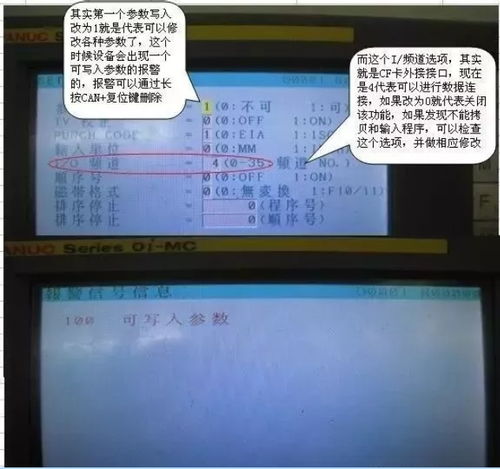
3. 避免使用系统变量
系统变量是FANUC数控系统内部定义的变量,用于存储系统状态、参数等信息。在编程过程中,应尽量避免修改系统变量,以免影响系统的正常运行。
FANUC系统宏变量是数控机床编程中不可或缺的一部分,它为用户提供了强大的编程功能。通过合理使用宏变量,可以提高编程效率,实现复杂的控制功能。本文对FANUC系统宏变量的概念、类型、使用方法以及注意事项进行了详细介绍,希望对读者有所帮助。
作者 小编
相关推荐


教程资讯
教程资讯排行
- 1 vivo安卓系统更换鸿蒙系统,兼容性挑战与注意事项
- 2 安卓系统车机密码是多少,7890、123456等密码详解
- 3 能够结交日本人的软件,盘点热门软件助你跨越国界交流
- 4 oppo刷原生安卓系统,解锁、备份与操作步骤详解
- 5 psp系统升级620,PSP系统升级至6.20官方系统的详细教程
- 6 显卡驱动无法找到兼容的图形硬件,显卡驱动安装时出现“此图形驱动程序无法找到兼容的图形硬件”怎么办?
- 7 国外收音机软件 app,国外收音机软件APP推荐
- 8 Suica安卓系统,便捷交通支付新体验
- 9 dell进不了bios系统,Dell电脑无法进入BIOS系统的常见原因及解决方法
- 10 能玩gta5的云游戏平台,畅享游戏新体验









