
fanuc的系统变量,编程与维护的关键
时间:2024-11-25 来源:网络 人气:
深入了解Fanuc机器人系统变量:编程与维护的关键
Fanuc机器人作为工业自动化领域的重要设备,其系统变量的合理运用对于编程和维护至关重要。本文将详细介绍Fanuc机器人系统变量的概念、分类、应用以及注意事项,帮助读者更好地理解和运用这些变量。
一、系统变量的概念
系统变量是Fanuc机器人编程和控制系统运行过程中,用于存储和传递数据的变量。这些变量可以反映机器人的状态、位置、速度等信息,对于实现精确控制和优化操作具有重要意义。
二、系统变量的分类
Fanuc机器人系统变量主要分为以下几类:
局部变量(1-33):局部变量只能用在宏程序中存储数据,例如运算结果。当断电时,局部变量被初始化为空。调用宏程序时,自变量对局部变量赋值。
公共变量(100-199,500-999):公共变量在不同的宏程序中的意义相同。当断电时,变量100-199初始化为空。变量500-999的数据保存,即使断电也不丢失。
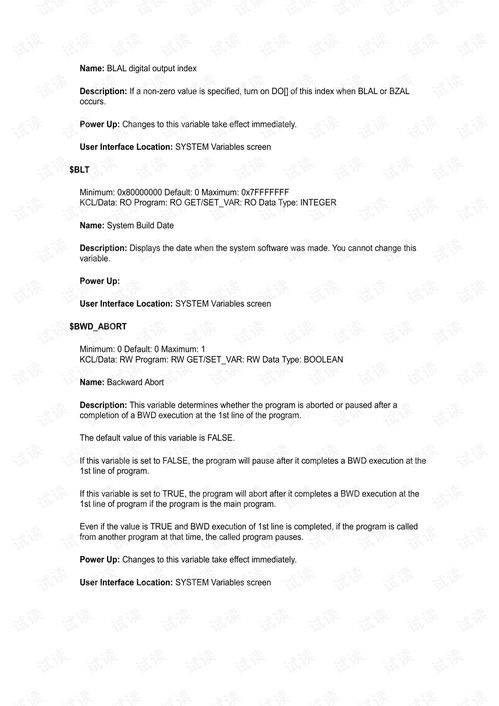
系统变量(1000):系统变量用于读和写CNC运行时各种数据的变化,例如刀具的当前位置和补偿值。
三、系统变量的应用
系统变量在Fanuc机器人编程和系统中具有广泛的应用,以下列举几个常见场景:
控制G代码和移动距离:在普通加工程序中,直接用数值指定G代码和移动距离;例如,GO1和X100.0。使用用户宏程序时,数值可以直接指定或用变量指定。
读取和设置刀具参数:系统变量可以读取和设置刀具的当前位置、补偿值等信息,实现刀具的精确控制。
监控机器人状态:通过系统变量可以实时监控机器人的运行状态,如速度、位置、负载等,以便及时调整和优化操作。
四、系统变量的注意事项
在使用系统变量时,需要注意以下几点:
变量命名规范:变量命名应遵循一定的规范,以便于阅读和维护。
变量类型选择:根据实际需求选择合适的变量类型,避免因类型错误导致程序运行异常。
变量值范围:注意变量值的范围,避免超出有效范围导致程序报警。
变量初始化:在使用变量前,确保变量已正确初始化,避免因未初始化导致程序错误。
Fanuc机器人系统变量在编程和维护中发挥着重要作用。掌握系统变量的概念、分类、应用以及注意事项,有助于提高编程效率,优化机器人操作。本文对Fanuc机器人系统变量进行了详细介绍,希望对读者有所帮助。

教程资讯
教程资讯排行









