bbp系统,高效、实用的快速原型开发平台解析
时间:2024-12-01 来源:网络 人气:
BBP系统:高效、实用的快速原型开发平台解析

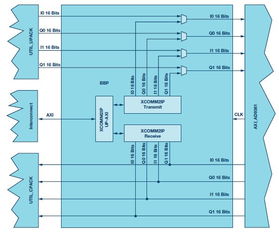
一、BBP系统的硬件构成

BBP系统主要由以下几部分硬件构成:
核心控制器:负责整个系统的运行和管理。
传感器模块:用于采集环境数据,如温度、湿度、光照等。
执行器模块:根据控制算法,实现对设备的控制,如电机、继电器等。
通信模块:负责与其他设备或系统进行数据交换,如Wi-Fi、蓝牙等。
电源模块:为系统提供稳定的电源供应。
二、BBP系统的对外接口
BBP系统具备丰富的对外接口,包括:
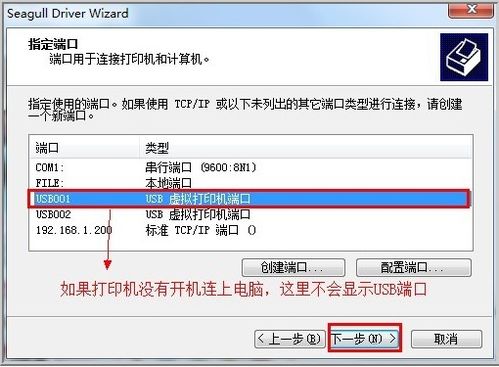
USB接口:用于与计算机连接,进行数据传输和调试。
串口接口:用于与其他设备进行通信。
GPIO接口:用于扩展外部设备,如传感器、执行器等。
网络接口:支持Wi-Fi、蓝牙等无线通信。
三、BBP系统的软件特点及功能

BBP系统基于PH7软件代码框架构建,具有以下特点及功能:
3.1 基于PH7软件代码框架构建
PH7是一个开源的嵌入式系统开发框架,BBP系统基于该框架构建,具有以下优势:
驱动层、应用层开源,方便用户进行二次开发。
算法层主要模块可替换、可扩充,满足不同应用需求。
3.2 FreeRTOS实时操作系统
BBP系统采用FreeRTOS实时操作系统,支持多线程运行,线程循环运行频率分别为1000Hz、250Hz、50Hz,满足不同应用场景的需求。
3.3 Mavlink协议支持
BBP系统支持Mavlink协议,用于地面控制站与飞行器之间的数据通讯。默认速率25Hz,可飞行中调整。可选原生协议或扩展安全协议,具有数据帧加密及上行控制帧防劫持功能。
3.4 数据总线系统
BBP系统在代码框架内建立数据传输、交换的通道,实现各模块之间的数据交互。
3.5 飞行控制参数存储及传输系统

BBP系统默认256个飞行控制参数,可扩充,数量受EEPROM容量限制。每个参数具有5个字段,用户可自由修改、增加、删除参数,可设置参数只读等属性。
3.6 航点数据存储及传输系统

BBP系统默认128个航点,可扩充,数量受EEPROM容量限制。配合CSS完成航点的增加、删除、传输。
3.7 飞行数据记录系统

BBP系统共可记录飞行数据66个,对于快速变化的如姿态角、IMU、速度等数据,记录频率为50Hz。
BBP系统作为一款高效、实用的快速原型开发平台,具有丰富的硬件构成、对外接口和软件
相关推荐

教程资讯
教程资讯排行
- 1 安卓系统清理后突然卡顿,系统清理后安卓手机卡顿?揭秘解决之道!
- 2 安卓系统车机密码是多少,7890、123456等密码详解
- 3 vivo安卓系统更换鸿蒙系统,兼容性挑战与注意事项
- 4 dell进不了bios系统,Dell电脑无法进入BIOS系统的常见原因及解决方法
- 5 希沃白板安卓系统打不开,希沃白板安卓系统无法打开问题解析
- 6 x9手机是安卓什么系统,搭载Funtouch OS3.0的安卓体验
- 7 安卓系统优学派打不开,安卓系统下优学派无法打开的解决攻略
- 8 安卓车机怎么查系统内存,安卓车机系统内存检测与优化指南
- 9 Suica安卓系统,便捷交通支付新体验
- 10 12pm哪个系统最好,苹果12哪个版本的系统更省电更稳定